▍ 泊车辅助
▍ 倒车雷达系统(PDC)
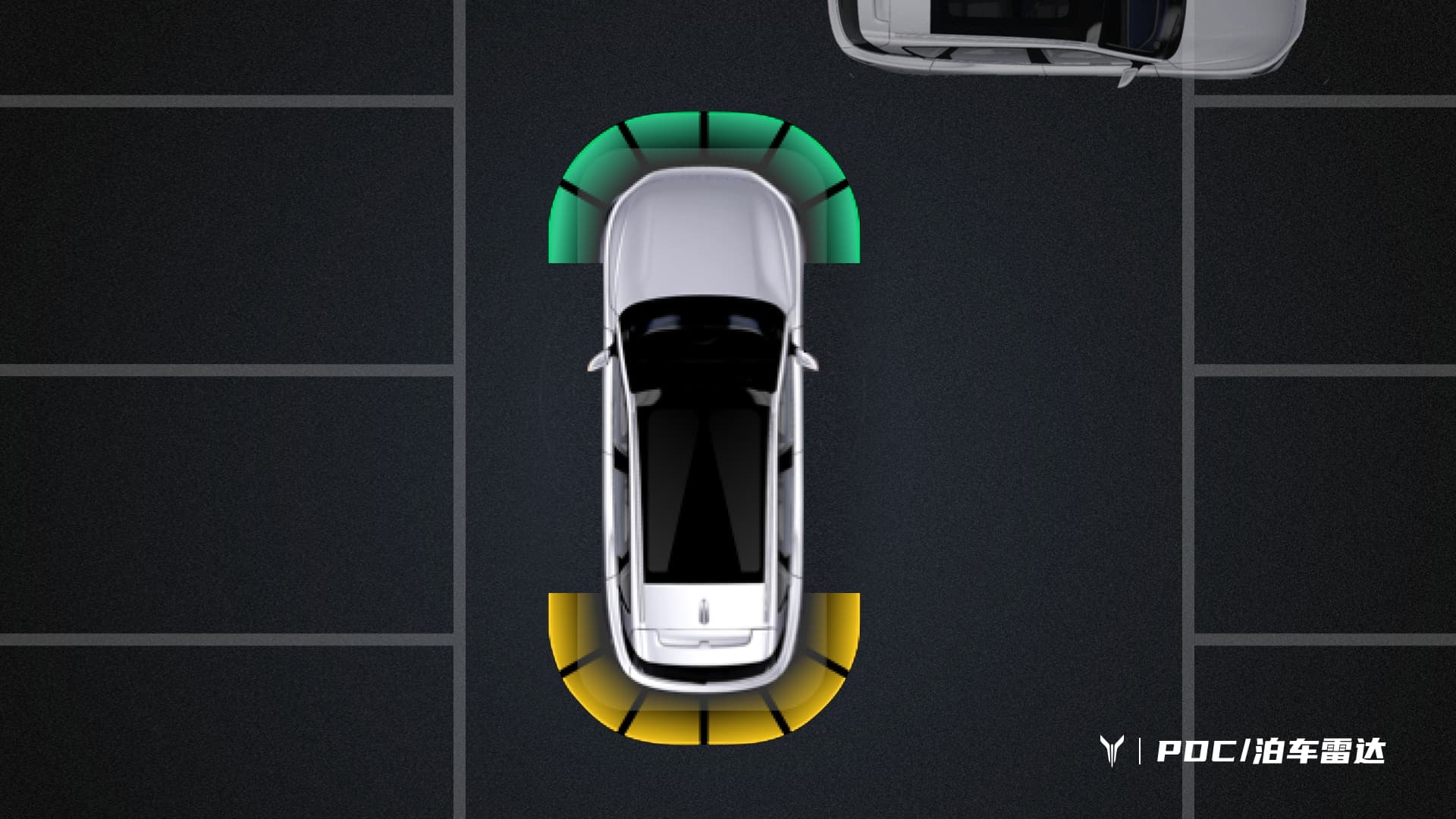
倒车雷达系统 (PDC)对障碍物进行测距和定位,以提醒驾驶员车辆周围是否有障碍物以及障碍物的距离。
PDC 系统工作范围:车速在 0~15 km/h之间。当车速超过 15 km/h 时,系统停止工作;待车速降到 12 km/h 以下后,系统重新进入激活状态。
▍ 不同障碍物距离雷达报警方式如下表所示:
| 类别 | 前雷达 | 后雷达 | 侧雷达 | 显示颜色 | 提示音 |
| 报警范围 | - | 100 ~ 150 cm | - | 绿色 | 每秒1次 |
| 60 ~ 100 cm | 60 ~ 100 cm | - | 黄色 | 每秒2次 | |
| 30 ~ 60 cm | 30 ~ 60 cm | 30 ~ 60 cm | 橙色 | 每秒4次 | |
| 0 ~ 30 cm | 0 ~ 30 cm | 0 ~ 30 cm | 红色 | 长鸣 |
▍ 前驻车雷达

前驻车雷达安装在车辆前保险杠上(共 6 个)。
▍ 后驻车雷达
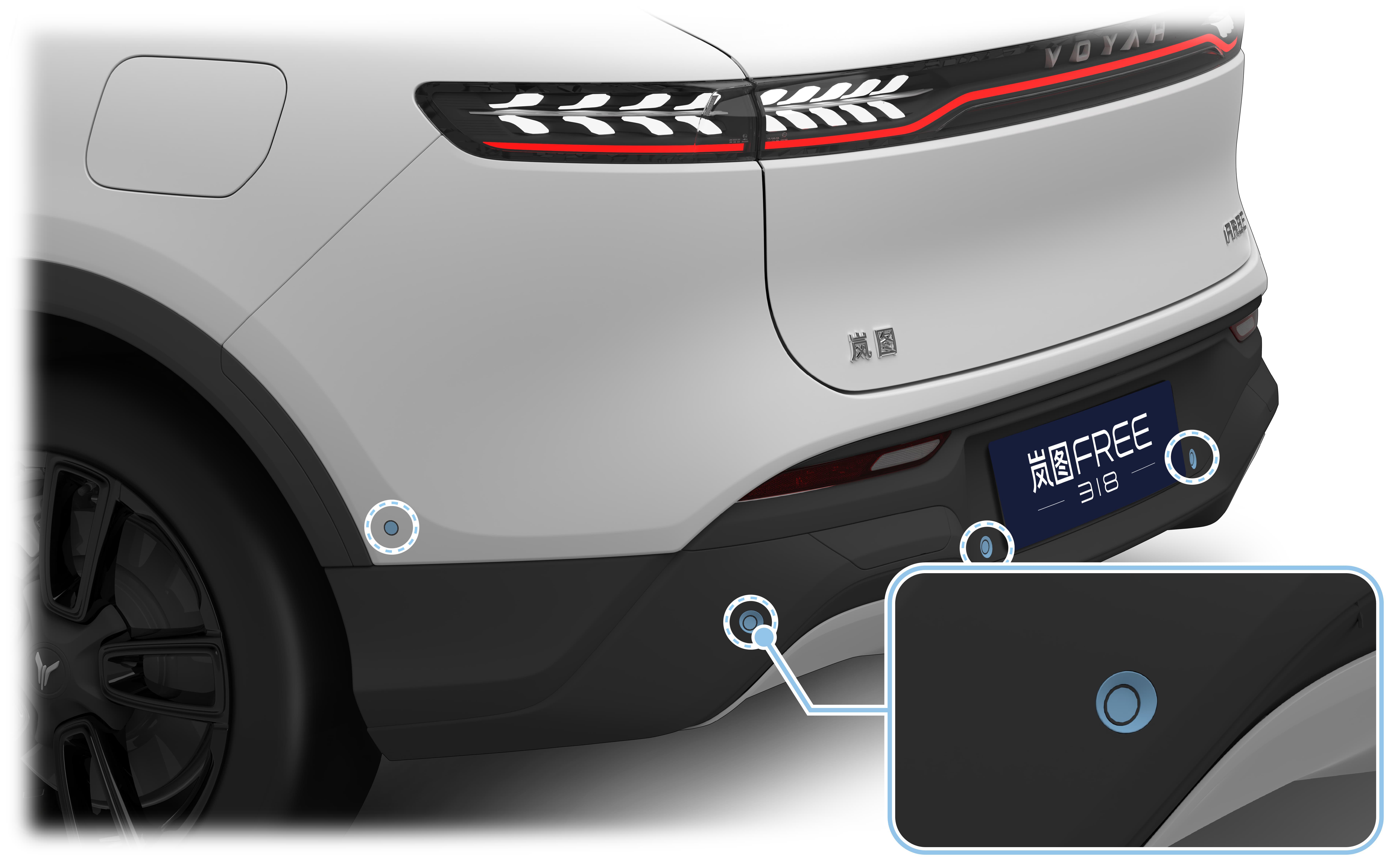
后驻车雷达安装在车辆后保险杠上(共 6 个)。
PDC 系统是车辆的安全辅助装置,以声音告知驾驶员车辆后部障碍物的情况,帮助驾驶员判断后方障碍物的距离,提高驻车安全。
▍ 雷达静音
- 当挡位处于 D / N 挡,且车辆静止时间达到 2 秒以上,且车辆与探测到的障碍物距离未变小时,雷达系统自动静音。
- 在 360°全景影像视图界面,点触雷达静音按键可开启 / 取消雷达静音。
- 挡位在 P 挡时,车辆驻车雷达不工作。
- 距离保险杠 25 cm 内的区域属于 PDC 系统盲区,位于该区域的物体可能无法被探测。
- 车辆在不平的路面或草地上,雷达可能会产生误报,此时驾驶员可以使用360度环视系统进行判断。
- PDC系统可能受到恶劣天气(如雨、雪等)、周边环境中的声波和电磁波等因素干扰,造成误报。
- 如果车辆的前后保险杠表面有污垢,被遮挡,受到撞击或损坏,都会影响雷达的探测效果,请及时处理。
- 在粘贴隐形车衣时,需要在雷达传感器位置进行破孔操作,确保传感器完全露出,避免遮挡雷达传感器,同时保证孔洞周围车衣平整无毛刺,以免影响探测精度。为了防止车辆划伤,建议联系岚图汽车服务中心进行专业操作。
▍ 功能限制
下列情况下(包括但不限于),驻车雷达可能无法探测到障碍物或者探测不稳定:
- 高度低于驻车雷达探头 5 ~ 10 cm的物体。
- 底盘较高的车辆,如渣土车等。
- 车辆前、后部存在的沟坎。
- 运动的物体。
- 铁丝、缆绳等网状物体。
- 松软的雪、棉、海绵等容易吸收超声波的物体。
- 驾驶员应始终对确保车辆安全驾驶承担最终责任,并遵守所适用的道路交通安全法律法规。倒车雷达系统不能代替驾驶员的观测,只能在有限的驾驶场景下起作用,驾驶员需时刻观察道路交通状况,以免造成人员伤亡和车辆严重损毁。
▍ 360°全景影像系统 (AVM)
360°全景影像系统 (AVM)采用 4 个车外摄像头,对车辆周围环境进行拍摄,并通过中控屏显示,实时为驾驶员提供车辆周围环境信息,辅助驾驶员安全泊车入位或通过复杂路况。
▍ 360°全景影像摄像头

前视摄像头位于前保险杠车标上方,用于摄制车辆前部区域。

后视摄像头位于两个牌照灯之间,用于摄制车辆后部区域。
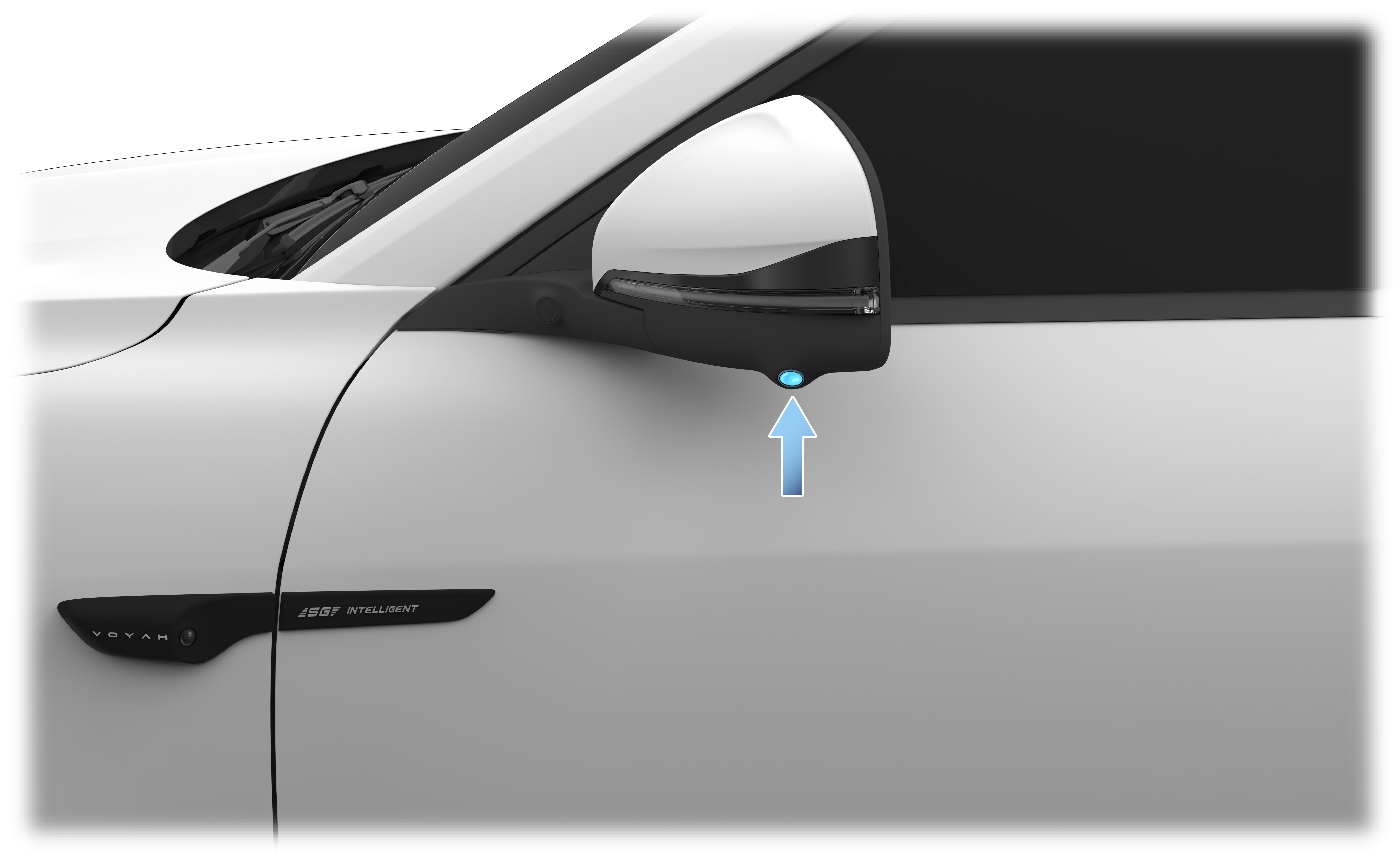
左、右摄像头位于左、右后视镜外侧底部,用于摄制车辆侧面区域。
- 应始终保持摄像头表面干净。清洁前摄像头时,应使用柔软、洁净的干布,避免刮伤摄像头。
- 摄像头存在一定盲区,驾驶车辆或泊车时,必须注意车辆周围环境。
▍ 开启 360°全景影像系统
车辆上电后:
挡位切入 R 挡,AVM 系统自动开启。

车速低于25 km/h,可通过副仪表板
 按键开启 AVM 系统。
按键开启 AVM 系统。可在全景影像界面
 设置界面,选择开启/关闭转向触发全景功能。功能开启后,当车速低于 25 km/h,驾驶员打开转向灯时,AVM 系统自动开启。如果车辆导航时不想使用此功能,还可开启导航抑制全景选项。
设置界面,选择开启/关闭转向触发全景功能。功能开启后,当车速低于 25 km/h,驾驶员打开转向灯时,AVM 系统自动开启。如果车辆导航时不想使用此功能,还可开启导航抑制全景选项。D 挡和 N 挡,车速低于15 km/h,驻车雷达系统探测到障碍物, AVM 系统自动开启(部分车型需开启雷达触发全景,才能触发此功能)。
非 R 挡,车速低于25 km/h时,驾驶员说 “Hi 岚图,开启 360 / 打开全景影像 ” 时,开启 AVM 系统。
▍ 关闭 360°全景影像系统
- 挡位切入 P 挡,AVM 系统自动退出。
- 非R挡,360°全景影像界面,驾驶员说 “Hi 岚图,关闭 360 / 关闭全景影像” 时,关闭 AVM 系统。
- 非R挡,车速大于30km/h时,AVM 系统自动退出。
- 非R挡,可通过全景影像界面返回按键关闭 AVM 系统。
- 非R挡,可通过副仪表板 AVM 按键关闭 AVM 系统。
▍ 全景影像子功能


系统工作后,进入全景影像视图界面,可进行如下操作或查看提示信息:
① 雷达静音
② 返回
③ 两侧视图/更多视角切换
④ 显示模式切换( 2D / 3D )
⑤ 透明车体切换
⑥ 启用 APA / HAVP
⑦ 设置(可对车牌号、轨迹线、转向触发全景等功能进行设定)
⑧ 摄像头方位切换
▍ 透明车体
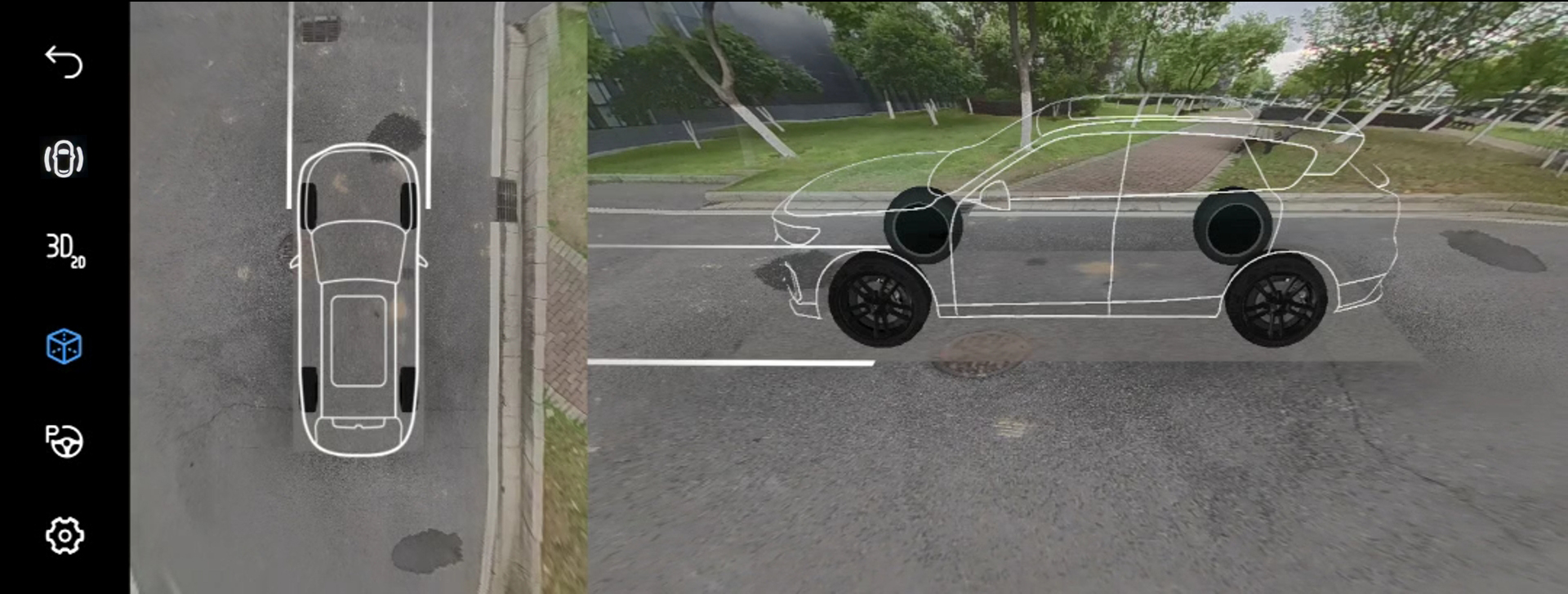
在 AVM 系统界面,点触俯视图车模区域或透明车体切换按键,可开启 / 关闭透明车体功能。
- AVM 系统开启时,中控屏会显示车辆周围拍摄的画面,并根据挡位显示相应的轨迹线。
- AVM 系统摄像头表面脏污、被遮挡、被磕碰或破损,会影响车辆周围环境的拍摄,请及时处理。
- 车辆周边环境光线较暗时,会影响摄像头拍摄效果。
- 驾驶员应始终对确保车辆安全驾驶承担最终责任,并遵守所适用的道路交通安全法律法规。AVM 系统不能代替驾驶员对车辆周围环境进行安全确认,只能辅助驾驶员观察车辆周围环境,驾驶员需时刻注意道路环境,以免造成人员伤亡和车辆严重损毁。
▍ 智能泊车辅助系统 (APA)

智能泊车辅助系统 (APA)通过智能驾驶传感器探测停车位以及障碍物的信息。系统对识别到的环境数据进行处理,并规划到目标停车位的泊车路径,控制车辆前进、后退、转向、制动等操作,将车辆泊入 / 泊出停车位。
APA系统可识别地面划线车位,包括标准的水平线车位、垂直线车位、斜列线车位;也可识别空间车位,例如两辆车中间的可供泊车的车位,包括水平空间车位、垂直空间车位。
▍ 开启智能泊车辅助系统
车速不超过 25 km/h 时,且车辆启动情况下:
按下副仪表板按键
 ,开启 APA 系统。
,开启 APA 系统。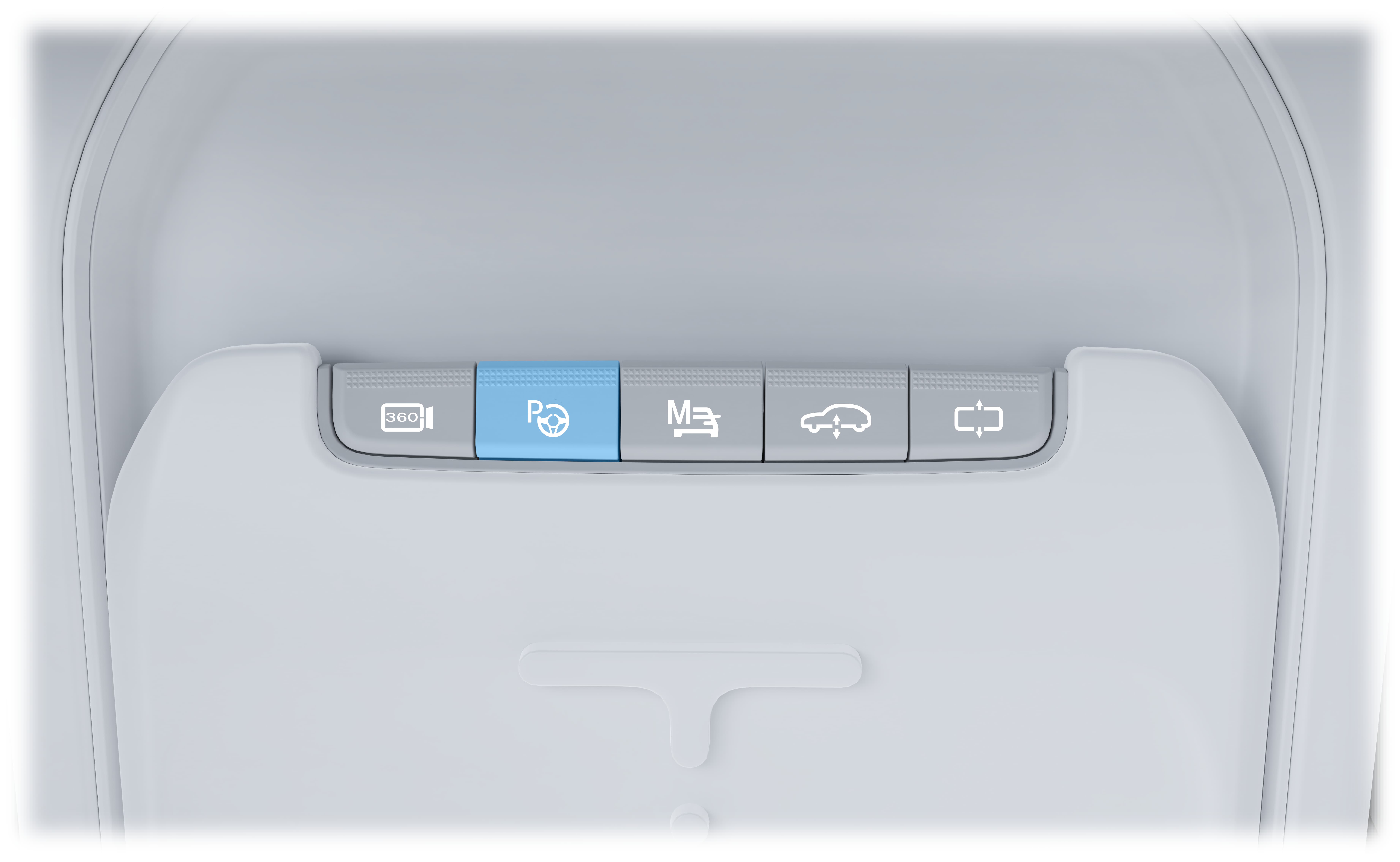
在泊车界面,点触图标
,开启 APA 系统。通过语音开启,如说“嗨 岚图,打开智能泊车辅助” ,开启 APA 系统。
- 当车速大于 25km/h,或车辆未启动,或系统 / 关联系统存在故障的情况下,360°全景影像界面图标将变灰,按下副仪表板按键,功能无法开启。
▍ 关闭智能泊车辅助系统
智能泊车辅助过程中:
- 再次按下副仪表板按键,关闭 APA 系统。
在泊车界面点触 “退出” 图标,关闭 APA 系统。
通过语音关闭,如说“嗨 岚图,关闭智能泊车辅助”,关闭 APA 系统。
以下情况(包括但不限于),将导致APA 系统退出:
- 踩下加速踏板。
- 启用电子驻车制动 EPB 系统。
- 转动方向盘。
- 操作换挡杆。
- 泊车路面坡度过大。
- 车位过小,泊车空间不足。
- 目标车位附近存在障碍物,导致无法规划泊车路径的情况。
- 泊车路径上有较高路沿、减速带,或存在有高度差的路面,出于安全因素考虑,可能无法越过。
- 车速大于 30km/h。
- 整车下 READY。
- 系统或关联系统故障。
▍ 功能使用
▍ 泊入

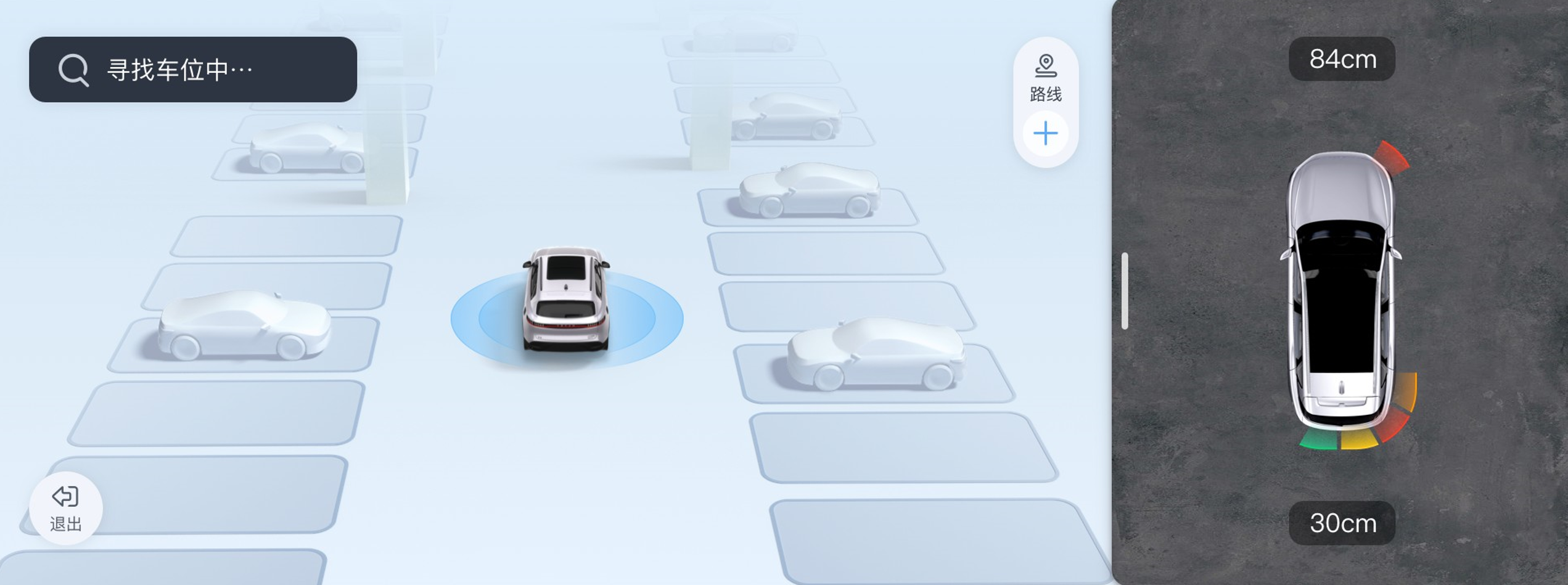
开启 APA 系统后,在泊车辅助模式选择界面,选择“泊入”并点触“确定”按键;或在该界面时,驾驶员控制车辆直行,当速度大于 1 km/h 时,系统将进入泊入模式,开始搜索车位。
搜索车位时,需尽量保证:
车速低于 15 km/h。
车辆与目标停车位的距离保持在 0.5 ~ 1.5 米之间。
车辆处于 D/R 挡。
搜索车位时,应尽量直行,与目标车位的夹角不应大于3°。
所有车门、电动尾门及前机舱罩均关闭。

系统将开始识别车位,驾驶员可以停车后通过点触中控屏上搜索到的车位的方式,确认需要泊入的车位,或者当驾驶员停车时,系统会默认推荐一个车位。
确认需泊入的车位后,在中控屏上点触“开始泊入”按键,系统将规划车辆行驶轨迹,并控制车辆使车辆泊入停车位。
- 车辆泊入时,当检测到垂直 / 斜列车位宽度较窄或单车障碍物距离过近时,将自动折叠外后视镜,避免因空间不足而无法泊入。
▍ 泊出
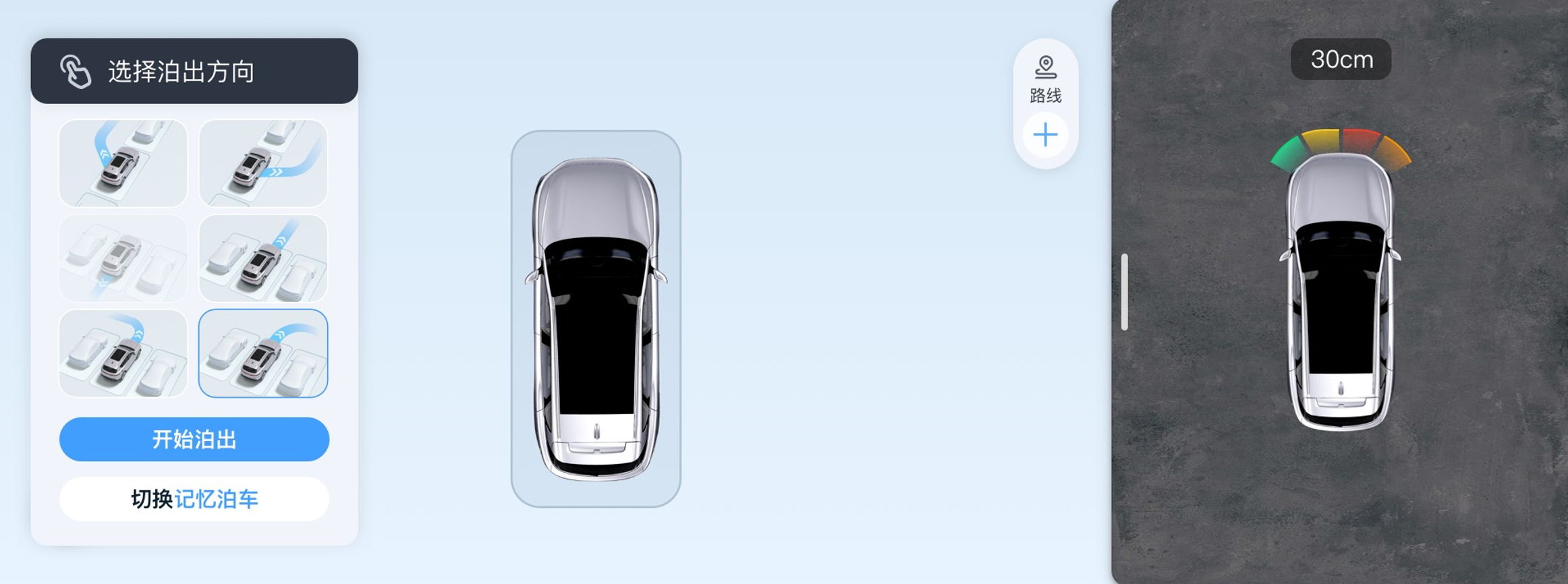
开启 APA 系统后,在泊车辅助模式选择界面,点触“泊出”按键后点触“确认”按键。通过点触中控屏上选项的方式选择泊出方向,点触“开始泊出”按键,系统会规划车辆行驶轨迹,并控制车辆使车辆泊出。
▍ 泊车辅助暂停
智能泊车辅助过程中,以下情况(包括但不限于)将导致泊车辅助暂停:
- 打开车门。
- 探测到泊车路径上有障碍物。
- 点触暂停按键。
- 打开前机舱罩。
- 打开电动尾门。
排除暂停条件后,点触恢复泊车,可恢复泊车进程。
▍ 泊车辅助完成
泊车完成时,中控屏上将显示泊车辅助完成。驾驶员需要确认挡位已切入 P 挡且电子驻车制动已启用后,再进行开启车门及车辆锁止下电操作。
▍ 功能限制
以下情况(包括但不限于),将导致 APA 系统可能受限或无法正常工作:
- 通过复杂路面(如弯道、上坡下坡、高速匝道、铁路道口、收费站、湿滑路面、拥挤路面、雪面、冰面、路面接缝、路缘、复杂的行人横道路口等)。
- 停车线被遮挡、不清晰、磨损、缺失等。
- 地面存在较强反光。
- 恶劣天气(如雾、霾、雨、大雪、冰雹等)。
- 周围环境光线不足(如黎明、黄昏、夜间、隧道中等)。
- 其它环境因素(如强光照射、夜间灯光纷杂、电磁场干扰、周围温度过高或过低等)。
- 前、后保险杠或前挡风玻璃处智能驾驶传感器表面有湿气、霜、冰雪、泥污、脏污、雨滴、被遮挡、被磕碰或破损。
- 擅自拆装或改变智能驾驶传感器位置,强烈震动或轻微撞击对传感器性能产生影响。
以下情况(包括但不限于),可能导致搜索车位过程中出现车位误释放,请驾驶员根据实际场景判断是否激活泊车辅助功能:
- 离划线车位较远(超过 1.5 米),导致车位内有车的情况下,出现误释放车位的情况。
- 停车位前或内部有锥筒、警示牌、细杆、低矮圆柱等障碍物。
- 停车位前或内部有吸收超声波材质的障碍物(如棉服等)。
- 搜索车位时车速过高,请尽量将车速保持在 10 km/h 以下。
以下情况(包括但不限于),可能导致泊车辅助过程中出现急刹,甚至导致出现擦碰等安全风险,请驾驶员保持警惕,随时控制车辆:
- 目标停车位内或附近有地锁、轮挡、带直角的方柱或路面有坑、不平整。
- 周围有使用相同频率超声波探头的车辆或有移动物体(如车辆、行人等)干预泊车。
- 目标停车位内或附近存在绿化带、草丛和树木。
以下情况(包括但不限于),可能导致泊车辅助无法按预期的方式运行,甚至产生车辆碰撞风险,请勿使用智能泊车辅助:
- 目标停车位狭窄或立体停车位。
- 目标停车位附近有细、尖、矮、悬空的物体(如矮石墩、低矮圆柱、细杆、消防栓等)。
- 目标停车位附近存在减速带、台阶、有高度差路面。
- 目标停车位附近有沟渠、悬崖、水池等。
- 目标停车位紧靠路边的栅栏、墙面、路灯、树木、灌木丛、柱子时。
- 目标停车位附近有客车、货车、卡车、自行车、三轮车或其他特殊车辆时。
- 目标停车位附近车辆装有拖车钩时。
- 目标停车位旁有铁丝网等空洞型障碍物时。
- 目标停车位狭窄。
- 目标停车位处于坡道。
- 车辆安装有拖车、雪地防滑链、使用备胎或非原装轮胎、胎压过低时。
- 装载物超出自车车身尺寸范围时。
- 天气恶劣,有中到大雪、路面存在积雪、中到大雨、路面存在积水等情况,系统可能无法找到车位,或因无法探测到障碍物导致安全风险。
- APA 系统无法在所有天气与交通路况的驾驶情形下全部起作用,许多因素都会影响传感器性能,从而导致制动干预或遗漏、产生无效、不必要、不准确的警告。
- 驾驶员应始终对确保车辆安全驾驶承担最终责任,并遵守所适用的道路交通安全法律法规。APA 系统不能代替驾驶员专注驾驶与准确判断,只能在有限的驾驶场景下起作用,无法对可能发生的碰撞进行预警或避免,驾驶员务必时刻观察道路交通状况,并注意随时准备控制车辆,以免造成人员伤亡或车辆严重损毁。
- 智能泊车辅助时,应特别注意车辆附近是否有行人、儿童、动物,和其它细、尖、矮、悬空等雷达探测受限的障碍物。
▍ 遥控泊车辅助系统 (RPA)*
驾驶员通过手机激活泊车后,泊车辅助系统将控制车辆前进、后退、转向、制动等操作,将车辆泊入/泊出停车位。
▍ 遥控泊入
功能开启及搜索车位方式同智能泊车辅助。
驾驶员确认需泊入的车位后,在中控屏上点触 “遥控泊车” 按键,同时确认挡位切入 P 挡且电子驻车制动已启用。驾驶员下车后通过岚图汽车 APP 激活遥控泊车辅助(打开岚图汽车APP,点击“遥控泊车辅助”图标,在泊车辅助就绪页面,通过滑动下方滑块的方式解锁遥控泊车辅助),系统会规划车辆行驶轨迹,并控制车辆泊入停车位。
- 车辆泊入时,当检测到垂直 / 斜列车位宽度较窄或单车障碍物距离过近时,将自动折叠外后视镜,避免因空间不足而无法泊入。
▍ 遥控泊出
车辆未上READY或未开启泊车辅助功能,驾驶员可通过岚图汽车 APP 在车外启动车辆,在岚图汽车 APP 界面点触“遥控泊车辅助”、“泊出”,并选择泊出方向后,可激活遥控泊车辅助功能(选择泊出方向后点击确认,在泊车辅助就绪页面,通过滑动下方滑块的方式解锁遥控泊车辅助),系统会规划车辆行驶轨迹, 并控制车辆使车辆泊出。
▍ 遥控泊车辅助暂停
遥控泊车辅助过程中,以下情况(包括但不限于)将导致泊车辅助暂停:
- 打开任一车门。
- 检测到泊车路径上有障碍物。
- 点触手机上暂停按键。
- 岚图汽车 APP 被切换到后台(包括来电弹出、接打电话、手机锁屏、手机熄屏、岚图汽车 APP 被关闭、岚图汽车 APP 被切换至后台运行等情况)。
- 手机距离车辆过远导致超出遥控泊车辅助范围甚至蓝牙连接中断。
排除暂停条件后,点击 “继续” 按键,可恢复泊车辅助进程。
▍ 遥控泊车辅助退出
遥控泊车辅助退出条件同智能泊车辅助。
▍ 遥控泊车辅助完成
遥控泊入完成时,岚图汽车 APP 将会显示车辆状态确认画面。当满足车辆挂入P挡,电子驻车制动EPB启用,车辆非 READY 状态时,系统下电锁车。若未满足任一条件,将出现提示按键,提示驾驶员上车控制车辆。
遥控泊出完成时,岚图汽车 APP 将会显示 “泊车辅助已完成” 画面。
- RPA 系统无法在所有天气与交通路况的驾驶情形下全部起作用,许多因素都会影响传感器性能,从而导致制动干预或遗漏、产生无效、不必要、不准确的警告。
- 使用 RPA 系统前,请务必仔细阅读 APA 系统章节,了解功能限制。
- 使用 RPA 系统时,需保持手机电量充足,尽量关闭手机后台运行程序, 以免造成手机卡顿,导致无法及时控制车辆,出现安全风险。
- 请确保蓝牙处于连接状态,并在可遥控范围内进行泊车。若岚图汽车 APP 出现异常退出,驾驶员需尽快上车控制车辆。
- 驾驶员应始终对确保车辆安全驾驶承担最终责任,并遵守所适用的道路交通安全法律法规。RPA 系统不能代替驾驶员专注驾驶与准确判断,只能在有限的驾驶场景下起作用,无法对可能发生的碰撞进行预警或避免,驾驶员需务必时刻观察道路交通状况,必要时请及时控制车辆,以免造成人员伤亡和车辆严重损毁。
- 遥控泊车辅助时,应特别注意车辆附近是否有行人、儿童、动物,和其它细、尖、矮、悬空等雷达探测受限的障碍物。
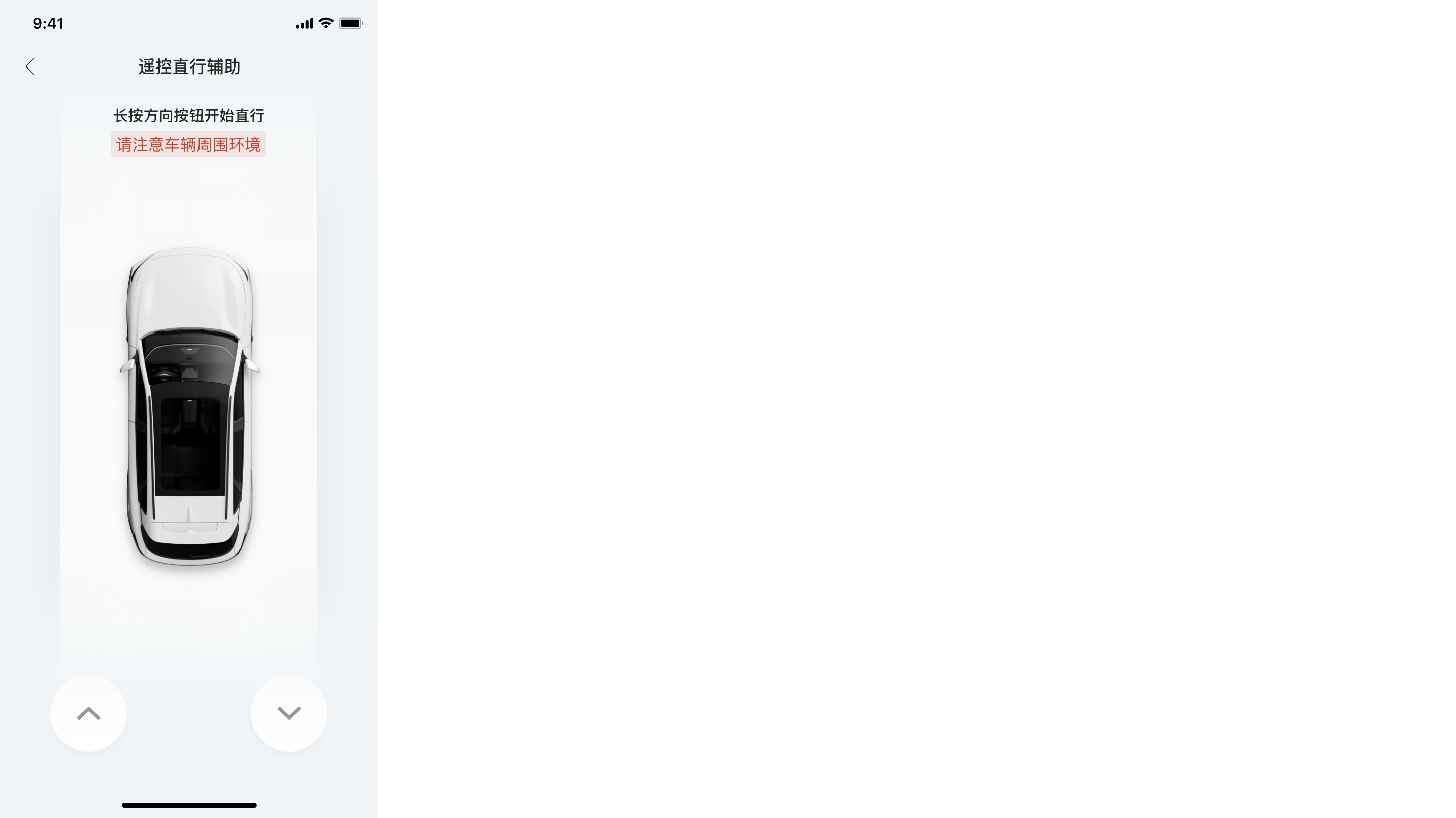
▍ 遥控直行辅助系统 (RSPA)*
准备使用遥控直行辅助系统(RSPA)时,无需上车启动车辆,驾驶员可以直接通过岚图汽车 APP 的“遥控直行辅助”功能遥控车辆直线前进或后退,解决窄车位等场景的泊车问题。
使用遥控直行辅助功能前,请确保车辆所有车门、前机舱盖、电动尾门均已关闭,且车辆未在充电、OTA 等其他状态。
▍ 操作步骤
驾驶员检查确认泊车环境是否安全适宜。
完成手机与车辆的蓝牙连接。
a. 进入手机设置页面,打开“蓝牙”。
b. 登录岚图汽车 APP。
c. 点触“蓝牙钥匙”连接蓝牙。
在岚图汽车 APP 选择“遥控直行辅助”,待系统完成启动后,长按前进或后退键遥控车辆直行前进或后退,松开按键车辆停止。
遥控直行过程中,如遇前方或后方障碍物有碰撞风险时,系统将在岚图汽车 APP 进行提示。请驾驶员检查周围环境并确认安全后,再继续遥控直行。
- 每次遥控直行可行驶的最长距离是 5m。
- 遥控直行辅助会解锁车辆,遥控直行完成后,请确保车辆已锁车后,再离开车辆。
- 使用 RSPA 系统前,请务必仔细阅读 APA 系统章节,了解功能限制。
- 如果 RSPA 泊车过程中遇到剐蹭或碰撞风险,但岚图汽车 APP 运行异常,可通过拉开车门暂停 RSPA,暂停后请及时控制车辆。
- 使用 RSPA 系统时,请将手机与车辆始终保持在蓝牙连接范围内(建议与车辆保持 2m ~ 5m 距离),同时请驾驶员注意不要站在泊车路线上。
- 遥控车辆直线前进或后退时,系统不支持检测、绕开车辆两侧的障碍物,驾驶员务必确保车辆周围环境安全适宜,无障碍物碰撞风险。若车辆周围存在障碍物时,驾驶员仍操作“遥控直行辅助”功能,可能发生碰撞风险。
- 驾驶员应始终对确保车辆安全驾驶承担最终责任,并遵守所适用的道路交通安全法律法规。RSPA 系统不能代替驾驶员专注驾驶与准确判断,只能在有限的驾驶场景下起作用,无法对可能发生的碰撞进行预警或避免,驾驶员需务必时刻观察道路交通状况,必要时请及时控制车辆,以免造成人员伤亡和车辆严重损毁。
- 遥控直行辅助时,应特别注意车辆附近是否有行人、儿童、动物,和其它细、尖、矮、悬空等雷达探测受限的障碍物。
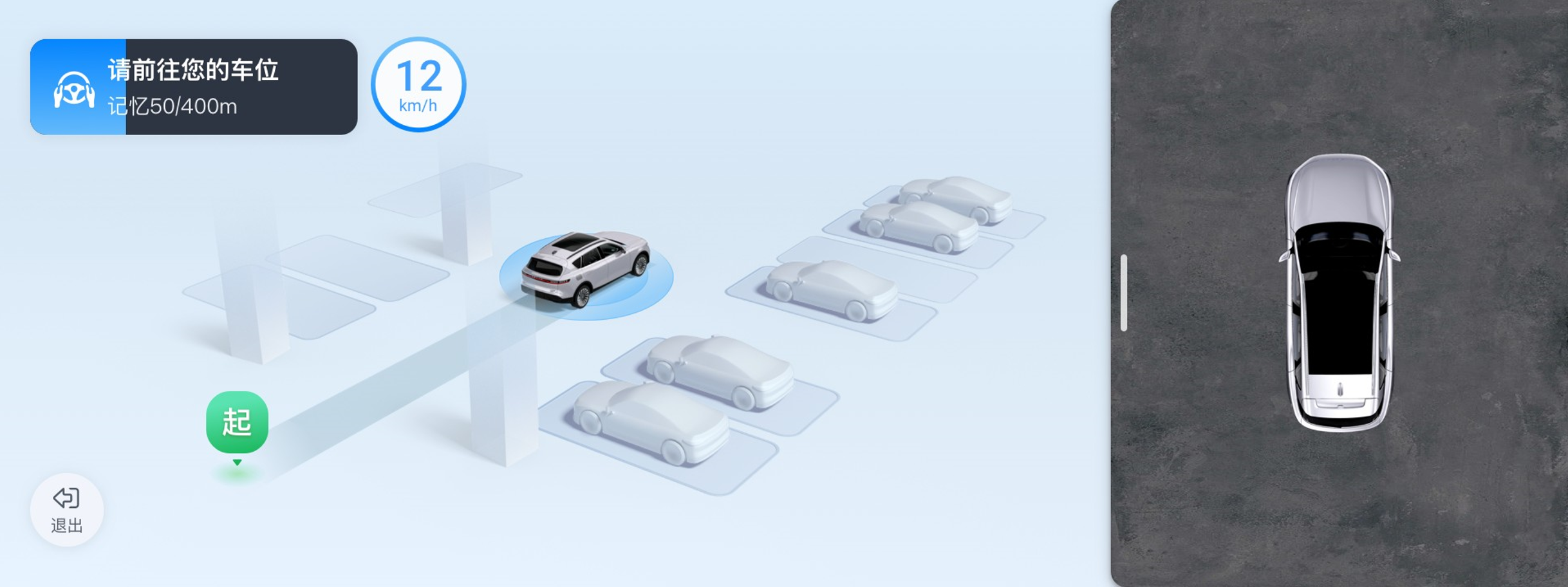
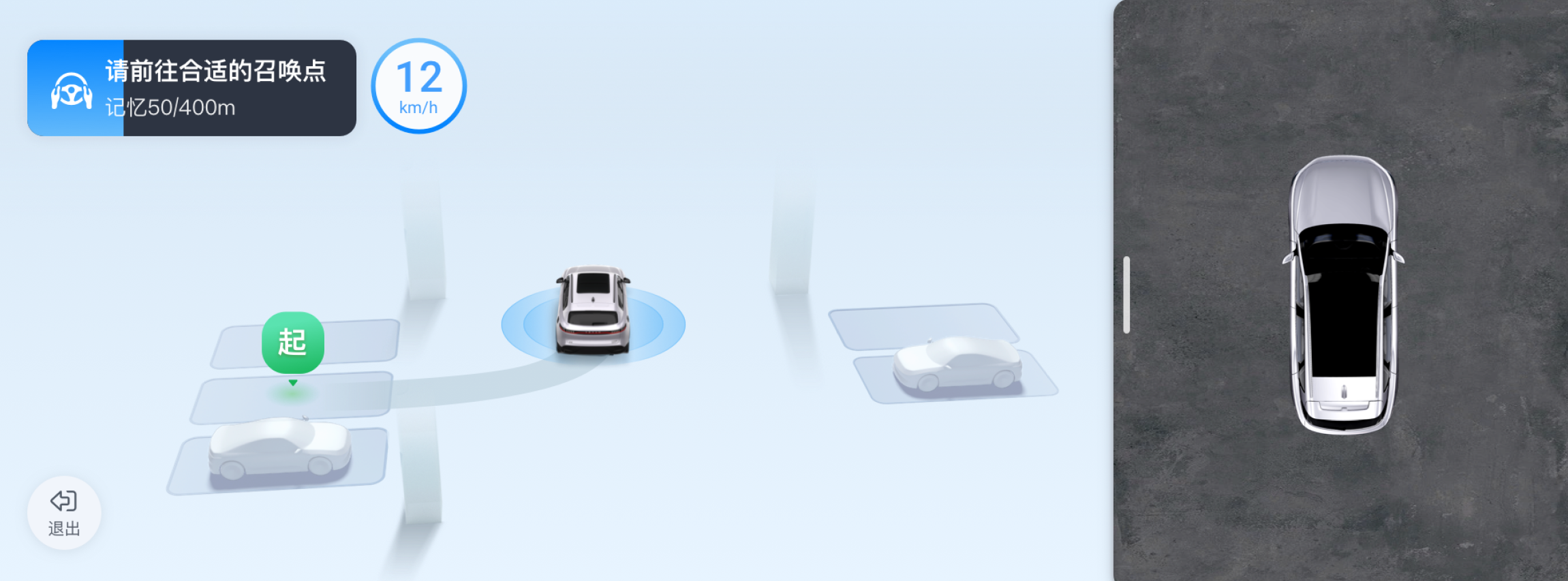
▍ 记忆泊车辅助系统 (HPP)*

记忆泊车辅助系统(HPP)通过智能驾驶传感器探测记忆学习将要巡航的路径上的特征点,停车位的信息。驾驶员开启功能后先行驾驶车辆在将要记忆的路线上学习一次,使得系统记忆住该路线。再次经过此路线时,系统可以匹配到该路线,之后沿着该路线巡航,完成泊车。
HPP 系统支持泊入车位和泊出车位两种使用场景,在泊入车位使用场景下,用户可以选择泊入固定车位或者沿途任一车位模式;在泊出车位使用场景下,自车将泊出到路线的终点。
用户可以通过中控屏激活车辆泊入泊出。
▍ 功能开关
车速小于或等于 20 km/h 时,且车辆启动情况下:
- 在全景影像界面点触智能泊车辅助图标,开启智能泊车辅助系统。
- 当中控屏顶部弹出灵动岛推荐路线时,点触可选择已学习的路线。
▍ 功能使用
▍ HPP功能教学及答题

使用HPP功能之前,需要您明确功能的运作场景,需要你扫码观看教学视频,并考试答题。
▍ 地图管理

在HPP界面下,点按路线按钮,进入路线管理界面。点击编辑按钮,对所有地图进行删除、重命名操作。地图数量上限为10条,每学习一个新地图时,地图数量增加一条,到达数量上限时新路线学习会失败。
▍ 路线学习
在HPP界面下,点按”+”按钮后,确认本次为泊入或者泊出路线后,开始新路线的学习。路线学习中请按照语音及文言提示操作。到达意图终点后,刹停或者挂入P挡将开始建图,请保持上电状态,等待地图生成。建图中可以点按编辑按钮,对路线名称做自定义命名。


建图可以看到地图概览。

▍ 使用路线
- 本地泊入
- 本地泊出
将自车驶入既学习过的路径上,顶部弹出提示匹配成功后,刹停车辆或者挂入P挡,进行车机操作。点击确认进入HPP界面,点击 “开始入库”后,松开制动踏板开始巡航泊车。
▍ 记忆泊车辅助暂停
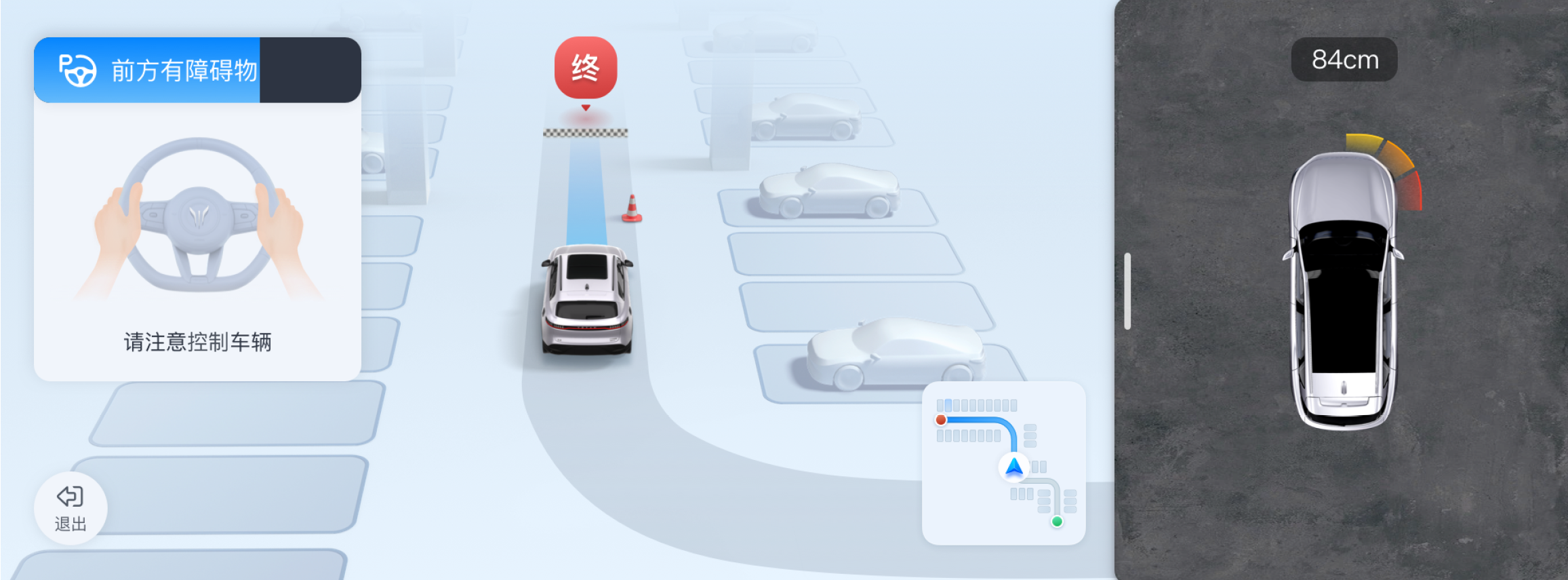
- 打开主驾车门以外其他车门。
- 检测到泊车路径上有障碍物。
▍ 记忆泊车辅助退出

巡航以及泊车辅助过程中,以下情况(包括但不限于),将导致泊车辅助退出:
- 踩下加速踏板。
- 启用电子驻车制动 EPB 系统。
- 转动方向盘。
- 操作换挡杆。
- 开启电动尾门或主驾门。
- 车位过小,泊车空间不足。
- 泊车路面坡度过大。
- 目标车位附近存在障碍物,导致无法规划泊车路径的情况。
- 泊车路径上有较高路沿、减速带,或存在有高度差的路面,出于安全因素考虑,可能无法越过。
- 点击中控屏上退出按键。
- 等待超时。
- 系统或关联系统故障。
▍ 记忆泊车辅助完成

当功能到达巡航终点或者被中止时,功能控车结束,功能退出并完成一轮控车。
▍ 功能限制
请勿在以下情况(包括但不限于)使用 HPP 系统,否则可能会发生碰撞的风险:
- 需要跨层或通过闸机的线路。
- 记忆路线场景的明暗变化、季节交替、路线重叠(可能导致车辆无法匹配路线)。
- 其他环境影响(如黎明、黄昏、夜间、地库中等晚上光照不足环境;雨天、雾天、雪天等恶劣天气;地面不平整的非铺装路面、狭窄道路、非划线停车场、公共开放式道路、光暗变化的眩光场所、无立面物体标识的空旷道路环境、反光玻璃墙体等)。
- HPP 系统无法在所有天气与交通路况的驾驶情形下全部起作用,许多因素都会影响传感器性能,从而导致制动干预或遗漏、产生无效、不必要、不准确的警告。
- 记忆泊车辅助不支持离车操作,驾驶员必须在主驾座椅上进行对应操作,并在必要时及时控制车辆。
- 驾驶员应始终对确保车辆安全驾驶承担最终责任,并遵守所适用的道路交通安全法律法规。HPP 系统不能代替驾驶员专注驾驶与准确判断,只能在有限的驾驶场景下起作用,无法对可能发生的碰撞进行预警或避免,驾驶员需务必时刻观察道路交通状况,必要时请及时控制车辆,以免造成人员伤亡和车辆严重损毁。
- 记忆泊车辅助时,应特别注意车辆附近是否有行人、儿童、动物,和其它细、尖、矮、悬空等雷达探测受限的障碍物。
▍ 哨兵模式
哨兵模式,也称 “车辆 24 小时监控” 。当哨兵模式开关处于开启状态且动力电池电量充足时,车辆锁止后功能启用,并通过360°全景影像摄像头和振动传感器实时监控车辆周边环境。当达到触发条件(如车辆被碰撞、发生盗抢等)时,系统将录制事件记录视频,同时通过岚图汽车 APP 或手机短信给车主发送提示信息。
哨兵模式默认关闭,每次开启仅单次生效。
▍ 开启 / 关闭哨兵模式
可通过以下方式开启 / 关闭哨兵模式:
- 在中控屏车辆安全&维护界面,可开启 / 关闭哨兵模式功能。
- 在中控屏右滑负一屏界面,点触哨兵模式按键,可开启 / 关闭哨兵模式。
- 可通过语音助手开启 / 关闭哨兵模式,语音指令请参考语音助手章节。
车辆未处于充电状态,动力电池电量高于 20 % 时,可开启哨兵模式;哨兵模式开启后,动力电池电量低于 15 % 或切出 P 挡时,会自动关闭。
在中控屏
车辆安全&维护界面,可设置哨兵报警方式(仅灯光 / 灯光+喇叭)。
▍ 视频回放
在中控屏全应用行车记录仪点触 可进入哨兵录像界面,查看哨兵模式录制的事件记录视频。
根据不同风险等级,哨兵录像分为低、中、高风险 3 类。
可进入哨兵录像界面,查看哨兵模式录制的事件记录视频。
根据不同风险等级,哨兵录像分为低、中、高风险 3 类。
▍ 功能限制
以下情况(包括但不限于),哨兵模式可能无法录制到有效视频:
- 车环境光线较差 / 摄像头脏污 / 被遮挡时,哨兵模式可能不会触发。
- 当外部环境变化引起车身强烈振动时,哨兵模式可能误触发。
- 停车环境有人员或车辆频繁经过时,哨兵模式可能会多次触发。
- 由于哨兵模式自身的局限性,视频仅做参考,实际事故判断请以道路周边监控摄像头为准。
- 哨兵模式开启后,部分车辆零部件(如 360°全景影像系统)将持续处于工作。为减少车辆电量损耗、延长零件使用寿命,建议在安全停车环境下,不要长时间开启哨兵模式。